
















































We’ve seen a wide arrangement of biologically-inspired robots lately. But this next one might scare you a bit, since it does take a substantial leap into the robopocalyptic future. This robot, made by the University of Tokyo and coined Kenshiro, has human-like bones and muscles, one step closer to having humanoid robots that move just like us.
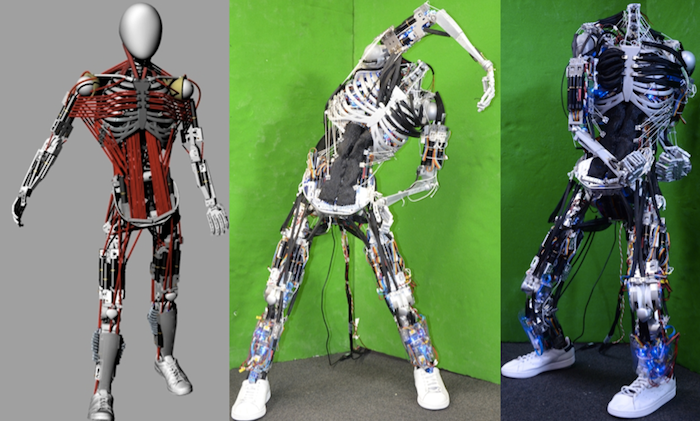
Kenshiro is made to mimic the body of the average Japanese 12-year-old male, with a height of 158 cm (5’2″) and a weight of 50 kg (110 lbs). His body is built to mimic almost all of the muscles found in the human body, using 160 pulley-like “muscles” to move its joints all around. These are no ordinary pulleys, though. While most usually follow the conventional point-to-point system that stretch only between specific points, larger planar (sheet-like) muscles are used that are flatter and wider. These planar muscles only require one motor to control, making the entire robot much stabler and more freedom of movement.

Also, Kenshiro’s bones are quite a spectacle. Made of aluminum, they are sturdier than their prototypes, and feature numerous improvements, such as an incredible rib cage and better knee joints (with the cruciate ligament and the kneecap). Such bones will eventually make the robot to be able to sustain injury better and with more support.
With improvements in muscle torque and joint speeds, Kenshiro can almost do everything that humans can, such as the gymnastics-like leg stretching in the video. Still, Kenshiro’s joint angular speed isn’t as fast as a humans, with only 70-100 degrees per second. Before this is solved, robots will probably not be physically superior to humans in a humanoid state, but they’re catching up quickly.

