
















































Most humanoid robots in the past have had a fatal flaw. With stiff joints that could potentially whack someone who they work alongside or lose balance and fall to the ground, most humanoid robots aren’t necessary fit to work with other people. But COMAN was created with the sole purpose of fixing this problem.

Meet COMAN, short for COmpliant huMANoid. Created by the Italian Institute of Technology, COMAN is the size of a four-year-old child, 94.5 cm tall and weighing 31.2 kg. It is made of a titanium alloy, stainless steel, an aluminum alloy, and is covered with an acrylonitrile butadiene styrene (ABS) Plastic exoskeleton. This robot features 25 degrees of freedom (number of independent parameters that dictate behavior), and uses a combination of compliant and stiff joints to avoid the problems that most other robots encounter.
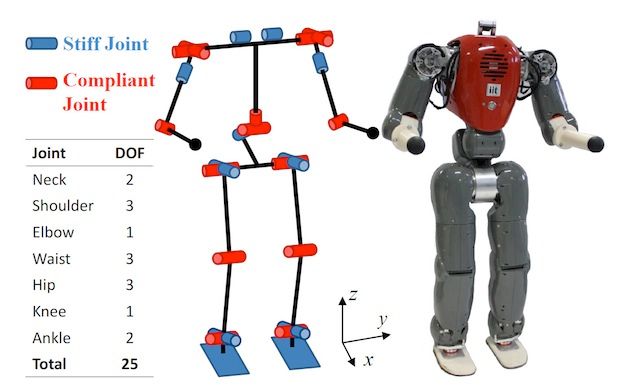
14 of these degrees of freedom rely on series elastic actuators, which operate the joints to make the robot able to withstand forces. If you want an in depth abstract about how these patented actuators work, you can check it out here.
So why do series elastic actuators make a difference? Well, they are elastic, meaning that they absorb the impact energy (ground reaction forces) of each footstep. The same process can apply to other joint areas on the robot’s body, and combined with their strategic placement similar to those in the human body, COMAN can withstand gentle impacts from most sources.
COMAN is only the precursor to a world where people work alongside robots. When the humanoid robots become more able to function like human beings, they also become safer to work with. And thus, we walk towards a world of peaceful harmony… or do we?

